


RJX Vector 700 3D Speed

Written by Chris Mulcahy A nice eye-opener for some alternate designs. Flight video and review Featured in RC Helicopters in Model Aviation June 2015.
Test-Model Details
Radio system: Futaba 14SG; Futaba R6203SB receiver Flybarless system: Futaba CGY750 three-axis gyro Motor: KDE Direct KDE700XF-535-G3 535 Kv ESC: Castle Creations Phoenix Edge HV 160 controller Servos: RJX FS0521HV/BLS0521THV servos Batteries: Two FlightPower 5,000 mAh LiPo batteriesReview
RJX Helicopters has been around for quite some time. When people started experimenting with flybarless rotor heads, it was RJX that had the conversion kits. Fast-forward a number of years and one of the company’s latest creations is the 700-size Vector 3D Speed. This helicopter is a unique-looking machine because it doesn’t have any landing gear. Instead, it balances on its nose, similar to a tricycle, and it has two short fins that jut out from the rear of the fuselage. The full-body fuselage promises plenty of speed, and the beefy mechanics are designed with speed setups in mind. This heli can be set up for speed or 3-D flying. I chose 3-D. Its construction is typical of most helicopter builds. The quality of the parts appears to be good, and it has all bearings in all the right places. The drivetrain uses a belt-and-pulley system, which first reminded me of the SAB Goblin helicopters—the motor drives a main pulley via a heavy-duty belt that in turn drives the tail and main gear. The motor tension is taken up using a bolt that pulls the motor tray away from the belt pulley. A unique feature on this helicopter that I haven’t seen before is an antirotation bracket. It is a pivoted arm that travels straight up and down, and is physically bolted directly to the swashplate and upper main bearing plate. It seems to work great, with the drawback being slightly more maintenance. The servos are designed to sit on the edge of the main frames, keeping the slim profile required to fit the fuselage around. The tail has a large-diameter carbon-fiber boom that does not require boom supports, and the tail fuselage simply sits over the boom and is bolted in place. The tail-belt tensioner looks similar to an RC car shock, but it’s mounted sideways. The shock is smooth and does a nice job of keeping that tail belt under control. The tail-blade feathering shaft is a floating style that rides on dampers, with bearings and thrust bearings in the grips. The tail hub is a beefy chunk of aluminum that looks as though it will be durable. The tail rotor servo is mounted inline directly in front of the boom so that the tail rotor pushrod can travel down under the boom, but inside the tail fuselage. The motor is mounted to an aluminum tray, and the shaft is supported by an additional bearing below. The KDE700XF-535-G3 motor fits perfectly, with no adjustments needed to the motor shaft. The bulk of the mechanics is installed in the upper main frames, with the lower frames used to hold the battery. I mounted the Castle Creations Edge HV160 ESC on the mounting plate at the front of the heli, and there was plenty of room to spare with the large controller in place. I installed a 2,000 mAh 2S LiPo battery receiver pack on the side, under the ESC. The high-voltage RJX servos require no regulator. I mounted the Futaba CGY750 three-axis flybarless system on the electronics plate at the back, and the Futaba R6203SB S.Bus receiver on the side. I made sure that all of the wiring was neatly routed. The build went well, but I hit a couple of snags along the way. The first was the fit of the forward fuselage section. Out of the box, the front part of the fuselage did not sit flush with the rear half. I was told this was because of climate changes during shipping.
All parts were bagged and numbered.
I took a heat gun to it, and got it roughly 95% perfect then I left it taped for approximately a week. I’ve discovered that if I leave the front half off for any length of time, it loses its shape. The forward canopy is held in by two thumbscrews like a traditional canopy, and there are five small posts that keep it in place around the perimeter. There are magnets installed around the edge too, but mine were not glued in flush and would not engage. The receiving side of the five posts consists of holes in the lower lip of the rear fuselage, and I found that they are easy to break if you tap the nose of the canopy with your foot. The other issue I had was with the removable battery tray—it wasn’t removable. The battery tray is required to bend as it is pushed into the rails, and eventually snaps into place. I could not get the battery tray in more than a third of the way and it was extremely tight— with no battery attached. I had to do a little surgery to make it fit. If those two issues could be resolved, I would have a stellar aircraft on my hands. It’s not something that can’t be fixed, but I can imagine people becoming frustrated with it.
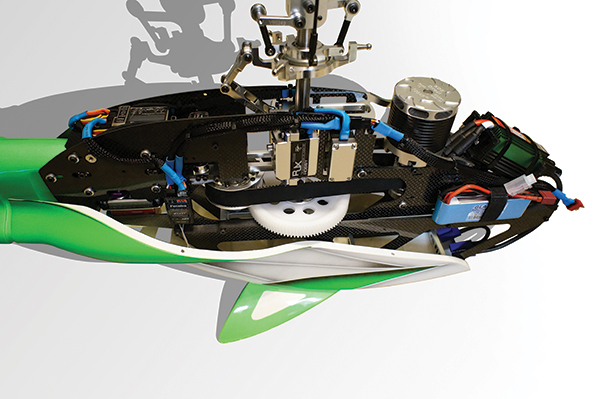
The final assembly is just about finished.

The Vector is ready for its maiden flight..
The Vector is a fantastic-flying helicopter. It is incredibly smooth and responsive. As soon as I started flying it, I forgot about the problems and had a blast. Although the helicopter weighs 13 pounds, 6 ounces, it feels light in the air and is fast even without a dedicated speed setup. Building the Vector was an enjoyable experience and a nice eye-opener for some alternate designs.
Sources
RJX Hobby [email protected] www.rjxhobby.com KDE Direct [email protected] www.kdedirect.com Futaba (217) 398-8970 www.futaba-rc.com Castle Creations (913) 390-6939 www.castlecreations.com International Radio Controlled Helicopter Association (IRCHA) www.ircha.orgThis Month's Issue

Join the AMA
![]()



Add new comment