


The Battery Clinic: November 2013

Written by Red Scholefield Battery selection for multirotor aircraft Column As seen in the November 2013 issue of Model Aviation.
“The time has come,” the Walrus said, “To talk of many things: Of shoes—and ships—and sealing-wax …” —Lewis Carroll Through the Looking-Glass After more than eight years, “The Battery Clinic” column has come to an end. There has not been enough information about new batteries and systems for me to write about. I am fortunate to have enlisted Craig Wainwright, a local modeler who has been working with multirotors for more than five years, to share his experience as a guest writer for my final column. Craig is a technical support engineer for General Electric and specializes in Linux.
Choosing the Best Battery for Your Multirotor
When choosing the best battery for your multirotor, there are a few things to consider, but you must first do some homework. My goal is to help you find the best batteries for your multirotor, based on the hardware requirements and application. There are a couple of important things you should consider when doing any maintenance, testing, or troubleshooting with RC multirotor models. The first and most important is that you always remove the propellers when they are not necessary. I cannot stress enough the importance of this. If you must have the propellers mounted on the motors, as is necessary in some testing steps, please have the model secured to a heavy stationary object and keep people (especially children) and pets away from the area. As you can see in the photo below, the multirotor is fastened to a heavy wooden stool with Velcro straps. This provides a convenient, safe, and reliable test stand. You also need a way to measure the voltage, amperage, and wattage of your power system. A tool such as the widely used Watts-Up meter is invaluable. Measuring power system capabilities is slightly different on a multirotor than on a single-motor RC airplane or helicopter. If you connect your meter between the battery and power distribution of your multirotor model (all ESCs and motors are powered), you must divide the measurements by the total number of motors used. To demonstrate, I measured peak watts (Wp) and peak amps (Ap), first with a single motor connected and second with all four motors connected as shown in one of the photos. In the following text, all references to volts, amps, and watts refer to a single motor and ESC.
This multirotor is secured for testing.
Before reviewing battery options, you need to do a calculation regarding thrust. All-up weight is the total weight of your model in its ready-to-fly state, with all electronics, battery, etc. The standard rule of thumb for multirotors is that your power system (motor and ESCs) should be capable of producing thrust equal to twice the total all-up weight of your multirotor. The equation for this is surprisingly simple. The thrust-per-motor requirement should be the all-up weight of your multirotor divided by the total number of motors. For a multirotor with four motors, each must be capable of producing half of the aircraft’s weight in thrust. If your quadcopter has a weight of 50 ounces, and 50 ounces divided by 2 equals 25 ounces, then each of your motors must have at least 25 ounces of thrust at 100% throttle. For 450-size multirotors, for example, I use an 800 Kv motor. The manufacturer’s specifications for this motor with a 10 x 3.8 propeller is 29.28 ounces of thrust on 3S and 42.68 ounces of thrust on a 4S pack at 100% throttle. This is slightly more than the 2-to-1 requirement, so there is plenty of headroom to provide enough extra thrust without being hard on the throttle for extended periods. There are three basic things to consider when making the best battery choice for your multirotor: voltage, C rating, and weight. Determine which is the most important to you and your application. These considerations also have sub factors that will influence them. Let me separate and explain them.
Voltage
This may be the easiest choice you have in choosing a battery. The amount of battery voltage should be based on the needs of your power system. Most important is the combination of your motor’s Kv rating and the size of your propellers. If you choose motors with a higher Kv rating such as 1,000-1,400 Kv, you will likely use a 3S (11.1-volt) battery. If you choose motors with a lower Kv rating, in the 600-1,000 Kv range, you will likely use a 4S (14.8-volt) battery. Pay attention to the manufacturer’s recommendation and thrust calculations and correlate that with your motor choice.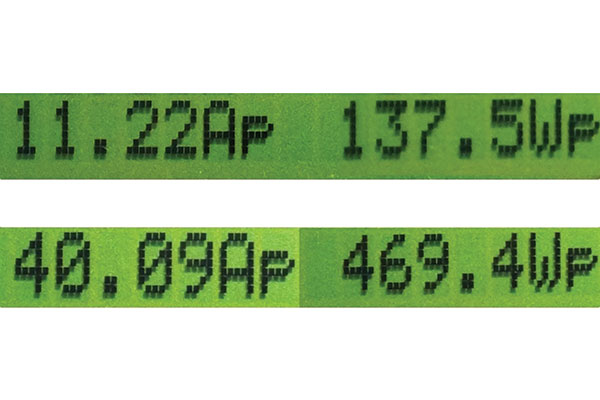
Motor power comparison for a single 1,000 Kv motor and four 1,000 Kv motors. Top: 3S (11.1-volt) battery - single 1,000 Kv motor. Bottom: 3S (11.1-volt) battery - four 1,000 Kv motors.
C Rating
The C rating of a LiPo battery gives you an estimate of the maximum number of amps the battery can supply at a constant rate for an extended period of time. Weight and my wallet are two things that are important to me regarding multirotor models. I attempt to find an affordable battery with the highest C rating and the least weight. Higher C-rated batteries are often slightly heavier. But, the higher the C rating, the less stress on the battery, prolonging its life. A battery with a higher C rating also holds a higher voltage under load. This keeps motors turning and multirotors in the air longer. If you choose a battery with a C rating that’s too low for your motors, the voltage will drop more than it should and the battery will heat up, reducing its life. Find a good balance between weight and discharge rate.Weight
Weight is the multirotor pilot’s worst enemy (along with magnetic trees—we can’t seem to keep away from them). Using a battery that is too heavy for your multirotor can cause several problems. The main drawback is unnecessary stress on your motors and ESCs. The heavier the load, the harder your motors and ESCs have to work to keep your multirotor in the air. The harder you push those parts, the shorter their life. If you have a battery that is so heavy that it eats into the recommended thrust ratio, you will have shorter flight times and an undesirable performance. Some manufacturers advertise batteries that are lighter and claim they retain the same power output as their heavier counterparts. Those tend to sag more than heavier ones. You may consider choosing a battery that is slightly heavier, but has a higher C rating to prevent starving your multirotor of power. Some multirotor applications may require more than one, and possibly several, batteries. My l,000mm Y6 utilizes four batteries: two flight batteries in parallel for the flight system, ESC, and motors; one battery for the FPV pilot’s view; and one for the gimbal operation and camera operator view. In instances where multiple batteries are required, the weight factor becomes crucial. Lighter and more efficient parts may be needed to facilitate the additional battery weight. Finding the perfect combination of electronics, hardware, and batteries for your multirotor is not complex. All it takes is some homework and making the right choice for the application. -Red ScholefieldSources:
Craig Wainwright [email protected] The Battery Clinic 12219 NW 9th Ln. Newberry FL 32669This Month's Issue

Join the AMA
![]()



1 comments
I think there might be an
Add new comment