


Build U/Tronics Multichannel Decoder Units
Written by Clancy C. Arnold Multichannel Decoder Unit Part Three Featured in the Model Aviation June 2015
In Part 1, we built a single-channel unit and in Part 2 we built a multichannel encoder unit. Now we will build a multichannel decoder, which is the aircraft portion of a multichannel system. All U/Tronics Control units are designed for use with standard (not digital) servos or ESC. The U/Tronics Control (U/T) multichannel system can be built as a four-, five-, six-, or seven-channel system. In Part 2, you determined the number of channels, servos, or ESC you will need to control for your model. We will build a four-channel system. Drawing 2 shows how to add channels five, six, and seven, if desired.

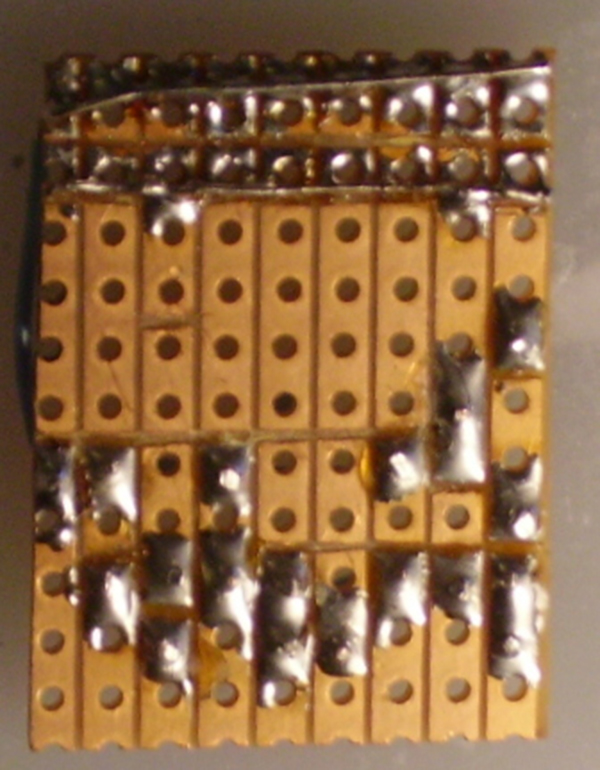
Multichannel decoder circuit board (copper) side, nine paths with 11 holes each. The paths are cut in 32 places.
The component side of the multichannel decoder circuit board with jumpers installed.

The component side of the multichannel decoder circuit board with its components installed.
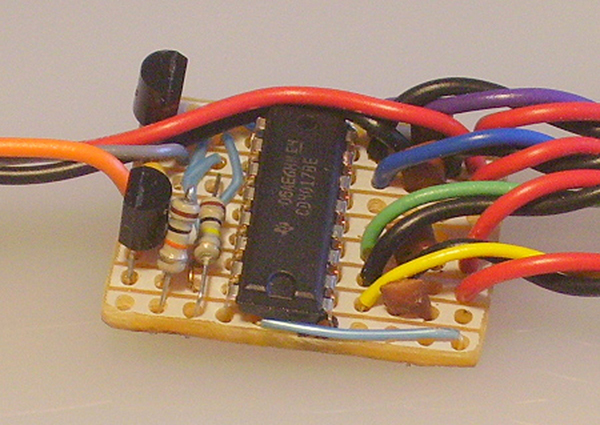
The component side of the multichannel decoder circuit board with wires installed.
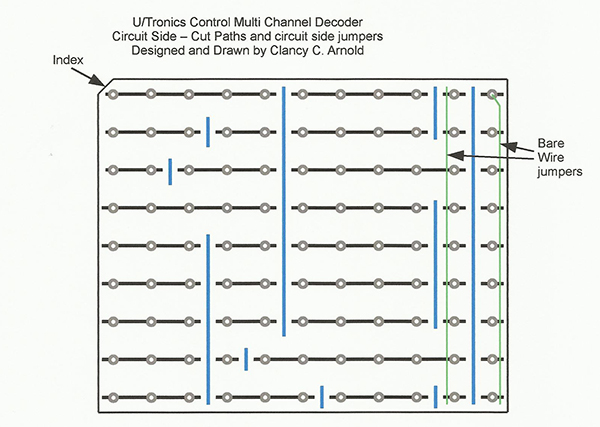
Multichannel decoder drawing with the circuit side shown.
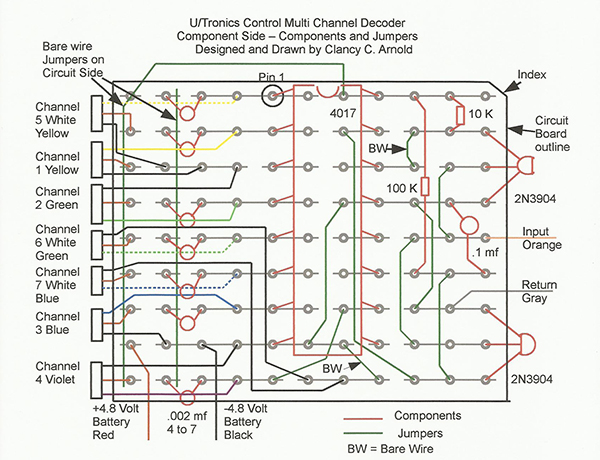
Multichannel decoder drawing with the component side shown.
Assembly
Saw the board from the prototyping perf board material. Make sure the saw teeth are cutting from the circuit (copper) side. If cutting from the component side, it may pull the copper paths from the board. I cut the boards by sawing through the next set of holes and then filing the edges smooth. You can make three decoder boards and one single-channel board at a time from the 35 paths across the prototyping perf board material. Select and bevel one corner as shown in Drawing 1. This will give you an index mark to know which end is up when you turn the board over. Alternatively, you can put paint or tape on the corner to serve as an index marker if you wish. Following Drawing 1 and Picture 1, cut the copper paths in 32 places. There is .060 inch of space between holes. Try to remove .015 to .020 inch of copper centered between the holes unless otherwise indicated. I use a sharp #11 blade and pull it firmly twice across the path in two places and then use the point to pick the copper between the cuts from the board. Use a permanent marker to mark on the component side of the board the location for Pin 1 of the 4017 decade counter IC. Visually inspect the board to ensure that the paths are completely cut and a gap exists between the ends of the cut paths. The best way is to hold the board up with the circuit side toward you in front of a strong light source (see Picture 1). Note that all jumpers, components, and wires are inserted from the component side and soldered on the circuit side of the board unless otherwise directed. Always wipe the old solder off of the soldering iron’s tip before soldering each wire or component. I use a damp cellulose sponge. Do not exceed 10 seconds on any one solder joint! Each of the right two columns of cut paths are bused together. Refer to Drawing 1 for the location of the jumpers on the circuit side. The jumpers must go beside, not over, the holes to allow other wires to be added. For the column nearest the edge of the board, cut a 3-inch length of insulated solid copper wire and strip roughly 11/2 inches of insulation from one end. Insert the bare wire through the first hole from the component side, bend it over and solder the bare wire to the path. Form the bare wire across the rest of the paths in the column of holes between the holes and the edge of the circuit board. The end of the bare wire can be held in place by bending it around the edge of the board. Be sure it is located to the right beside the holes in the paths to allow additional wires to be added as shown in Drawing 1. Solder the bare wire to each path. Cut the end of the bare wire flush with the edge of the board. Form the insulated end of the wire, as shown in Drawing 2 and Picture 2, strip the excess insulation, insert, solder, and trim the jumper. For the second column of holes from the edge of the circuit board, use insulated solid copper wire strip and cut a piece of solid wire 2 inches long. Secure it in place beside the second row of holes as in Drawing 1 and Picture 2 by bending the ends around the edges of the board. Be sure it is located to the left of the holes in the paths to allow additional wires to be added (see Drawing 1). Solder the solid bare wire to each path, being careful to not bridge the cut paths below the bare wire. Cut the ends of the bare wire flush with the edges of the circuit board. Visually inspect the board for solder bridges between paths—especially between the second bare wire jumper and the cut paths. See Drawing 1 and Picture 1. Visually verify that the jumpers are installed correctly as in Drawing 1, Drawing 2, and Picture 2. Cut to length, form, install, and solder two bare wire jumpers as shown in Picture 3 and Drawing 2. After soldering each component or wire, trim the excess leads flush with the solder on the circuit side of the board (see Picture 1). From the insulated solid copper wire, strip and cut a piece of solid wire 2 inches long. Cut the bare wire in half, form and install it, and solder per the Drawing 2 and Picture 2. Cut the insulated solid copper wire to length as required for each of the seven additional jumpers. Strip both ends approximately 1/4 inch, form, install, and solder as shown in Drawing 2 and Picture 2. Form the insulated wires around, not across, the bare tinned wires or any other insulated wires. Visually inspect the board for solder bridges between paths (see Picture 1). Visually verify that all jumpers are installed correctly per Drawings 1 and 2 and Picture 2. Many of the jumpers are inaccessible after the IC is has been installed and soldered. Warning: Before handling any integrated circuit or transistor, always touch a grounded piece of metal to reduce the chance of static electricity damaging the IC or transistor. The proper orientation of the IC is determined by the location of the indexing notch in the end, which is at the Pin 1 end of the package. Insert the 4017 decade counter IC on the component side of the board, with Pin 1 in the proper hole. Start one row of pins in their proper holes. Using the back side of an X-Acto knife blade, press the other row of pins inward to allow them to enter the correct row of holes. The spring tension in the pins will hold the IC in position for soldering. Visually verify that the pins are in the correct holes and that the IC is down against the board or wires that pass under the IC. Solder the IC pins on the circuit side of the board. Solder one row of IC pins at a time and allow time for the IC to cool before soldering the second row of pins. Visually inspect the board for solder bridges between paths (see Picture 1). Following Drawing 2 and the pictures, form the leads as required, insert and solder the components, then trim off the excess leads flush to the solder joint. Form the leads of the two 2N3904 transistors as required, install and solder. Note that one is mounted with the flat side toward the board and the other one is mounted with the flat side away from the board. One at a time, form the leads of each component as required, insert, solder, and trim off the excess leads. Start with the 10K resistor then add the 100K resistor and the 0.1 mF capacitor. Determine the number of channels you wish to control. Locate by channel number without skipping a channel number, install, and solder the appropriate number of .002 mF capacitors. Before installing these capacitors I tin their leads to improve the solder flowing properly onto the capacitor leads. Visually inspect the board for solder bridges between paths (see Picture 1). Cut a 5-inch length of the red and black wires. Strip 3/16 inch of insulation from the 5-inch red and black wire and the orange and gray wires and tin. Install and solder the wires in the locations indicated on the Drawing 2. Cut the number of three-pin headers from the 40-pin header equal to the number of channels you wish to control. From the red and black wires, cut 4-inch lengths to equal the number of headers. Strip and tin 1/8 inch of each wire then strip and tin 1/8 inch of the remaining 4-inch colored wires. Tin the short ends of the pins of the three-pin headers. Solder a red wire to the center pin of the header. Solder a black wire and one of the channel colored wires to the outside pins of the header. Repeat for each additional header. I use the channel colored wires indicated on Drawing 2. You may substitute as required, but be sure to use the same color code on the encoder build also and mark on your copy of Drawing 2 the colors that you used. Visually inspect the solder joints and repair as required. Cut 3/8-inch lengths of 3/16-inch heat-shrink sleeve. Place one over each wire, slide it down against the header, and shrink in place. Twist the three wires on each header together. Cut the wires to length as needed. Strip and tin 3/16 inch, dress, insert, and solder the leads into the holes indicated on Drawing 2. Visually inspect the board for solder bridges between paths (see Picture 1).Test Time!
Using an ohm meter, measure to ensure that the resistance between the red and black wires that go to the 4.8-volt battery is greater than 9K ohms. If not, perform another visual inspection and verify that all component leads and wires are in the correct holes. On the encoder, temporarily tack-solder a quantity of 10K resistors equal to the number of channels to the white wire. Tack-solder each of the channel color wires to the opposite end of each 10K resistor. Connect the encoder’s orange output and the gray return wires to the decoder’s orange input and gray return wires—orange to orange and gray to gray. Plug in one analog (not digital) servo to the yellow, Channel 1 three-pin header. Connect the encoder to a 9-volt battery. Connect the decoder to a 4.8-volt battery pack. The servo should move to one end position. Short out the 10K resistor connected to the yellow Channel 1 encoder wire. The servo should run to the opposite end position. If that worked, move the servo to the next channel or add another servo and repeat the test for each channel wired. When you are finished watching it operate, unsolder the white wire and all of the channel color wires from the 10 K resistors. Disconnect the orange and gray wires between the encoder and decoder units. After you have it working properly coat the units with two coats of Plasti Dip for tool handles. When you buy the Plasti Dip shake the can. It should slosh around in the can. If it does not then it is probably out of date. After opening a can of Plasti Dip reseal it with a piece of aluminum foil covering the top of the can and extending part way down the sides and hold in place with the plastic lid provided. The plastic lid alone does not prevent the solvent from escaping. Install the U/T encoder unit in your model and connect it to the servos to control the functions in your model. Connect a 4.8-volt battery pack. If the battery is inside your model, be sure to provide a charging jack wired between the on/off switch and the battery. Connect and solder the orange and gray wires to a two-conductor connector. Add a mating connector to your insulated flying lines. The completed decoder unit should weigh approximately 16 grams. Mount the encoder and controls, pot, or switches in a box on your handle. Connect and solder the red and black wires to a mating connector for a 9-volt battery. Wire and solder the orange and gray wires to a two-conductor connector. Add a mating connector to your insulated flying lines. I use 2.5 mm miniature headphone jacks and plugs to connect my flying lines to my handle and model. The Encoder must be connected orange to orange and gray to gray or your system will not work.Caution
If you are going to use the unit in an electric-powered model with an ESC that has a BEC, do not install the 4.8-volt battery. Cover the red and black wires that were to connect to the 4.8-volt battery with heat-shrink sleeve material or tape them to prevent them from shorting together. The U/T Control multichannel decoder will be powered by the BEC via the servo cable connected to the ESC. Again, I want to thank Mike Boucher for taking on this build. He did a good job proving my three designs worked right out of the box. A special thank-you goes to Mike’s wife, Robin, and his daughter, Rachael, for letting Mike do this. And thanks to my wife, Pat, for putting up with my hobbies for 54 years. Welcome to the world of U/T Control.Bill of Material
All parts are available on eBay.- One prototyping perf board, 0.9 x 1.1 inch (nine paths of 11 holes each)
- One 4017 decade counter IC, 16-pin dip package
- Two 2N3904 transistors
- Four to seven .002 mF disc ceramic capacitor, 0.1 inch lead spacing (red edge)
- One 0.1 mF monolithic capacitor (axial leads)
- One 10K ohm 5% 1/4-watt resistor (brown, black, orange)
- One 100K ohm 5% 1/4-watt resistor (brown, black, yellow)
- 18 inches #26-gage solid insulated wire for jumpers
- 24 to 36 inches #24 red and black insulated stranded wires
- 4 inches #24 or #26 insulated stranded wires, six to nine different colors
- 5 to 8 inches 3/16-inch heat-shrink sleeve material
Read Parts One and Two


This Month's Issue

Join the AMA
![]()



2 comments
Correct error in text.
corrected
Add new comment