


Horizon Hobby Blade Fusion 480

Written by Chris Mulcahy A kit with varying levels of completion Product Review As seen in the June 2019 issue of Model Aviation.
At a Glance
Specifications
Model type: Collective-pitch flybarless helicopter
Skill level: Intermediate to advanced
Height: 11.9 inches
Length: 38.6 inches
Weight: Varies depending on equipment
Power system required: 40 mm to 43 mm 1,300 Kv to 1,400 Kv brushless outrunner motor; 90-amp ESC; standard-size cyclic and tail servos; 6S 3,700 to 5,000 mAh LiPo battery
Flybarless control system required: Accepts popular flybarless systems
Radio: Six-channel transmitter; accepts popular receivers
Blade length: 480 mm main rotor; 85 mm tail rotor (included)
Construction: Fiberglass canopy/body; carbon-fiber main frame
Price: $499.99 kit only; $599.99 Power Combo Kit; $749.99 Super Combo Kit
Test-Model Details
Power system: Blade 4320-1300 Kv brushless motor; Castle Creations Talon 90 ESC; Spektrum H6050 High-Torque Mid-Speed Heli Cyclic Servo; Spektrum H6060 Mid-Torque Ultra-Speed Heli Tail Servo; Pulse Battery 6S 5,000 mAh LiPo battery
Flybarless control system: Spektrum AR7210BX DSMX with BEASTX
Radio system: Spektrum DX6 radio; Spektrum DSMX remote receiver
Flight duration: 4 to 5 minutes
Pluses
- Subassemblies accelerate build time.
- All linkage rods are premade.
- High-visibility canopy.
- Will accept 5,000 mAh 6S LiPo battery packs typically used in 700-class helis.
Minuses
- Blade grip bearings are extremely hard to replace.
- Tail blade grips were too tight.
- The canopy is very thin; it can easily be damaged when being removed.
- Zero-pitch "tick" marks on blade grips did not align correctly.
Bonus Video
THE BLADE 480 is not an ARF like most other Blade helicopters, yet it isn’t exactly a full-blown kit either—although it is certainly closer to a kit than an ARF. The 480 arrives with some subassemblies, which greatly decrease the build time.
The kit includes carbon-fiber 480 mm main rotor blades, as well as carbon-fiber tail blades. Power is provided by a Blade 4320-1300 Kv motor and a 6S 4,400 mAh LiPo battery pack. To round out the equipment list for this review, I used the recommended Spektrum H6050 and H6060 servo set, a Spektrum AR7210BX receiver/flybarless combo, and a Castle Creations Talon 90 ESC.
My preferred battery is a 6S 5,000 mAh because I already have a few of them for my other helicopters. I consulted with the Blade team first about my battery choice. The 480 performs well with the slightly larger battery.
Assembly
The build begins with the main rotor head. Start with the prebuilt subassembly—the head block, blade grips, head spindle, dampers, and bearings are already together. The bolts that hold the blade grips on are only loosely fitted, and you must remove and clean them before reinstalling them with threadlocker.
Having built many helicopters throughout the years, I’ve developed certain habits, one of which is making sure the bearings are lubricated. This led me to try to remove the blade grip bearings, but I was unsuccessful. The main grip bearings seemed press-fitted into the grips and were difficult to remove.
I also found that the head spindle was extremely tight in the dampers, which made it difficult to remove. I only managed to nudge it slightly in one direction, which then upset the bearings on the main grips because the spindle would not center after tightening the blade grips. I was eventually able to even out the head spindle and relieve the binding on the blade grip.
Instead of inspecting the bearings personally, I inquired about the lubricant and was told that the bearings are indeed lubricated at the factory before assembly. With this in mind, I completed the head assembly by adding the pitch arms to the blade grips and the follower arms onto the head block. If I’d left it well enough alone and followed the manual, assembly would have gone much smoother!

Next up was the swashplate. All that was needed here was to apply threadlocker to all of the linkage balls. They are all the same size (with the exception of the ball with the antirotation guide pin), so there is no worry about mixing any of them up. The swashplate was then installed onto the main shaft and the head attached and bolted into place.
The head linkages were added next. One of the things I like about the 480 is that all of the linkage pushrods are preassembled at the factory. I don’t think I’ve ever heard a helicopter pilot say, "I love assembling pushrods," so this was a welcome addition. I checked the lengths with my caliper and was happy to see that they all matched.
The carbon-fiber side frames went together smoothly. The bulk of the action happens with the two main bearing blocks where the servos bolt into. The cyclic servos are vertically oriented at exactly 120° from each other. I really like this arrangement. I feel it gives each servo exactly the same movement, resulting in equal geometry all around. It also means that any of the three servos can easily be removed for maintenance.
The lightweight "profile" skids are also added at this stage. They are made up of a single piece of carbon fiber, bolted to the lower sides of the frames at approximately a 45° angle. The tail is belt driven, and the belt guide consists of two pulleys between the side frames that keep the belt on track.
The autorotation gear and the main gear come preassembled, but the screws must be removed to add threadlocker to the final assembly. However, I found that the screws on my autorotation hub already had threadlocker applied. The main gear has a slight slant cut to the teeth, giving the motor pinion more area to engage. I slid the gears into place, and the main shaft with the head assembly was inserted and bolted into place.
The motor is mounted in between the side frames, with the pinion coming out of the top of the bearing block. This configuration allows a large battery to be used in such a small space because the space on top where a motor typically rides can be utilized by a battery.
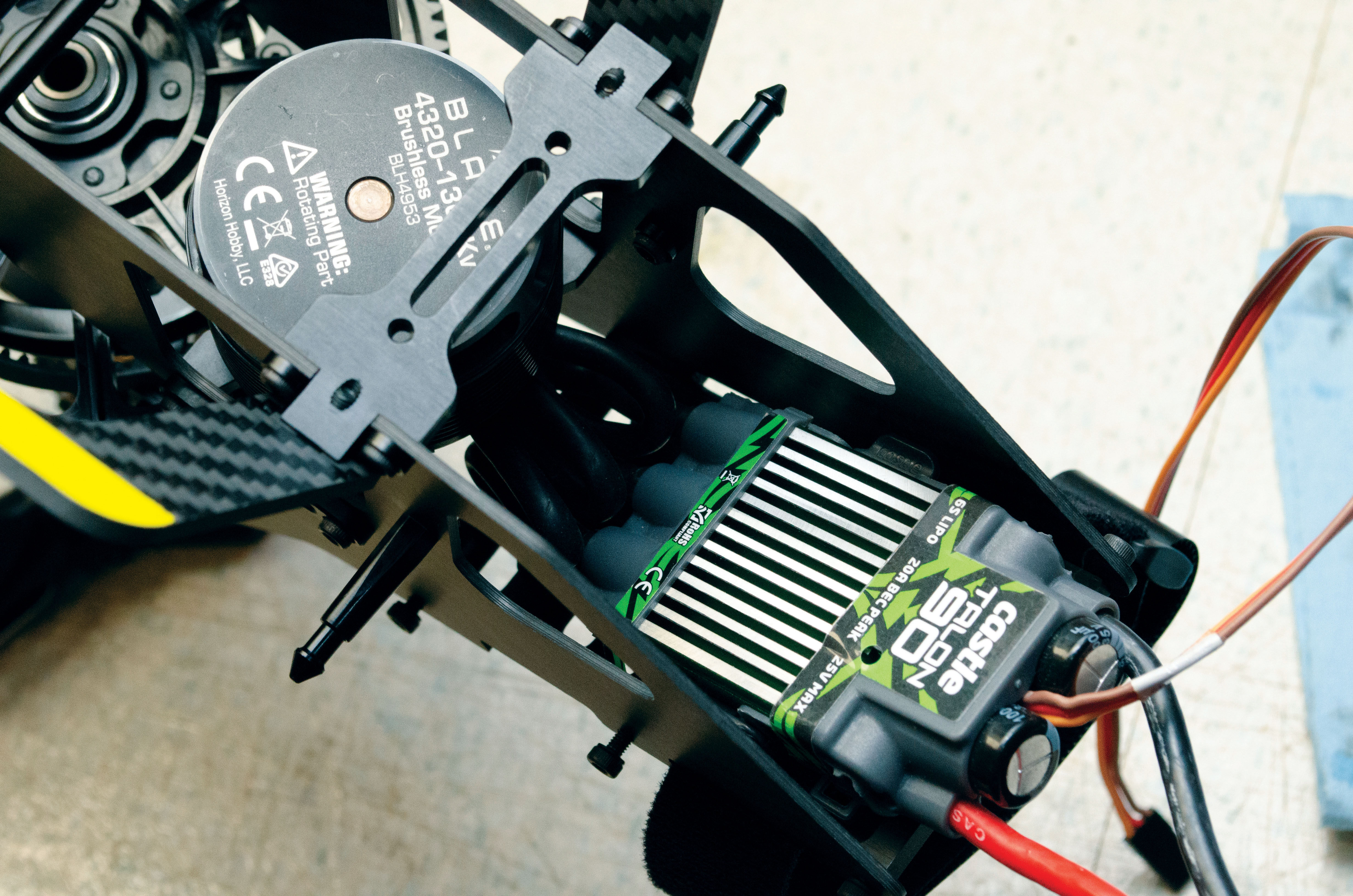

The Blade 480 was designed with the Castle Creations Talon 90 ESC in mind. Provisions were made specifically for it. The Talon 90 comes with a plastic cradle that has screw mounting holes molded into it. The battery plate has predrilled holes and is tapped on the bottom to accept the Talon 90. I really liked this setup because it took the guesswork out of where best to install the ESC and kept the motor-to-ESC wiring neat and out of sight.
All of the servos were then installed, with the tail servo mounted to small, aluminum L-shaped brackets in between the side frames. The tailboom was installed in a conventional manner, with two aluminum tailboom clamps that slide between the rear of the side frames. The tail rotor pushrod guide then slides onto the tailboom, and similar tailboom clamps slide onto the end of the tailboom as the foundation for the tail rotor hub.
Two carbon-fiber plates, one of which is the vertical fin, hold the tail rotor bearings and screw onto the rear clamps. The tail rotor blade grips are preassembled, just like the main rotor head. All that was needed was to add threadlocker to the spindle bolts and linkage balls to hold them in place.
With the tail rotor blade grips installed onto the tail output shaft, the entire assembly slides through the tail hub, capturing the tail pulley in the middle of the tail hub assembly. The tail belt tension is set by pulling back on the tail hub before tightening the bolts. The tail rotor pushrod clicks into place on the guide and snaps onto the ball links.

One final carbon-fiber plate is installed on the top of the side frames behind the main shaft. This is where the AR7210BX flybarless system was installed. The wiring was easy to run because there are plenty of zip-tie slots machined into the main frames. I also installed an additional satellite receiver on the lower side frame.
At this time, I test-fitted the blades. I found that the main blades were tight in the grips, but nothing that would cause any issues.
The tail blades were much tighter in the grips, and I was worried that this might cause issues on the first flight. I tried to work the tail blades in a little by rotating them back and forth in the grips, but this didn’t help. I opted to straighten them as much as I could and rely on centrifugal force to do the rest.
Programming
I bound the AR7210BX to my Spektrum DX6 transmitter. The transmitter setup is typical of most helicopter setups because the transmitter has minimal programming from a fresh model memory. Most of the programming is done through the AR7210BX. Programming the BEASTX side of the unit is straightforward, assuming that you have the manual nearby.
The LED lights across the top of the unit don’t indicate what they are for until the letters are referenced in the manual. Following the manual through each step makes setup easy, and all of the programming is done by using the button on the AR7210BX and the rudder stick on the transmitter.
I programmed the pitch range to +/- 12° according to the instruction manual. The main blade grips have tick marks that are supposed to be used to align the blades at 0° pitch; however, on my kit, the ticks weren’t even close to being 0°, and a digital pitch gauge was used to establish 0° pitch instead.
I used my Castle Link to set the Talon 90 governor to 2,100 rpm, 2,350 rpm, and 2,550 rpm for each of my flight modes. I also had to input the gear ratio and battery details while the computer was connected to the Talon 90.
Flying
As I mentioned earlier, I chose to use 5,000 mAh 6S battery packs. There was plenty of room beneath the canopy to fit a larger pack. Two hook-and-loop straps hold the pack in place, with additional hook-and-loop material beneath the battery. As I spooled up for the first time, I paid close attention to the tight tail blades, but they straightened themselves out as the rpm increased.

There are several flying modes on the BEASTX: Off, Normal, Sport, Pro, Extreme, and Transmitter. The default mode is Sport, which is where I started. The helicopter lifted off and maintained a steady hover. I flew a few laps around and adjusted the tail gain from default to eliminate some tail wag then flew it around some more to confirm my gyro settings.
The 480 felt light with plenty of power. I tried some basic flips and rolls and found that the default Sport mode was insufficient for my flying style. The helicopter was too slow during these maneuvers for my taste.
I landed and changed the BEASTX’s setting from Sport to Extreme. This yielded better results, and the helicopter responded more quickly during flips and rolls. I then changed the control behavior to Transmitter, which allowed me to dial in my settings more precisely using the transmitter’s traditional end points and dual rates.
After I was happy with the control setup, I started to have some fun with the helicopter. The 480 can be set up to be a quick and responsive 3D machine. The tail tracked extremely well through backward flight, and pirouetting maneuvers were consistent whether right-side-up or upside down. It was a lot of fun, and I averaged 4- to 5-minute flights, depending on how hard I flew.
The landing gear is slightly narrow, so I gave it extra attention when landing on the rough flying field. I would typically come into a hover then hit throttle hold and settle the helicopter gently onto the grass. The 480 will autorotate, but I don’t suggest trying that on a heli of this size unless you are an experienced pilot.
The belt-driven tail performed flawlessly. I’ve found that belt drives can be more forgiving on hard landings, which makes it a plus for newer pilots.
Although I had the BEASTX cranked up to 11, it does behave extremely well on milder settings. The BEASTX presets allow the 480 to grow with newer pilots as their skills progress. Another benefit for newer pilots is the SAFE technology built into the BEASTX. This is essentially a bailout mode that will bring the helicopter back to an upright hover at the flick of a switch, which is great if you are trying new maneuvers and lose orientation.
There are a few SAFE modes from which to choose, as well as a trainer feature that restricts how far the helicopter can pitch or roll (generally keeping it upright).

Summary
With a few minor issues in mind, the Blade 480 can be a great starter helicopter for those who are serious about getting into 3D or sport flying. Because of the range of settings available when coupled with the BEASTX, this helicopter can give even a seasoned professional a run for his or her money. Either way, it can be set up to suit most pilots’ needs.
Manufacturer/Distributor
Horizon Hobby
(800) 338-4639
SOURCES:
Spektrum
(800) 338-4639
BEASTX
Castle Creations
(913) 390-6939
This Month's Issue

Join the AMA
![]()



Add new comment